Had even gemist dat deze discussie zich hier verder voortzette. Dit blijft/blijkt toch een ingewikkeld, maar desalniettemin een belangrijk thema.
Zo had ik me bijvoorbeeld nooit gerealiseerd dat binning de 'echte' bit-diepte vergroot, maar daar heb je natuurlijk helemaal gelijk in Gerard.
Maar mag ik het verhaal nog een beetje ingewikkelder maken? Het verhaal is namelijk niet hetzelfde voor elke camera. Gerard vergelijkt bijvoorbeeld de ASI1600 en de ASI294. De ASI1600 heeft een 'traditionele' CMOS sensor, maar de ASI294 heeft een 'dual-gain' sensor. En de keuze voor unity gain of niet kan hier ook vanaf hangen.
De gain instelling is een onderdeel van de analoge signaal-verwerking in de pixel. Achter elke pixel zit een versterker die lading opbouwt in een condensator. Staat de versterker uit (gain 0, in fotografie-termen: base-ISO), dan moeten er nogal wat fotonen op vallen om de condensator te vullen. Zet je de versterker hoger (gain omhoog), gaat dat sneller. Dat betekent dat de gevoeligheid omhoog gaat, de ruis naar beneden, maar omdat de condensator sneller vol is, de Full well capaciteit en de dynamic range naar beneden gaat. Beide standen hebben hun voordeel: Lage gain is minder gevoelig, maar geeft groot dynamisch bereik. Handig voor bijvoorbeeld een sterrenhoop. Hoge gain is gevoeliger, maar laag dynamisch bereik, handig voor bijvoorbeeld narrow-band foto's van zwakke nevels.
Unity gain is een wat arbitraire maat, gedefinieerd als 1 foton geeft 1 electron, maar is uiteindelijk een soort middle-of-the road instelling waarmee je eigenlijk altijd wel min of meer goed zit. Maar vergeet niet, dat unity gain een significante verlaging betekent van je dynamisch bereik en full well depth. Voor de ASI1600 is de full well depth bij unity gain bijvoorbeeld 4ke (t.o.v. 20ke bij gain 0) en het dynamisch bereik is iets meer dan 11 (t.o.v. 12.5 bij gain 0).
Samengevat is het voor de ASI1600 dus: Hogere gain = hogere gevoeligheid, lagere full well capacity, lagere dynamic range, lagere ruis
Voor de ASI294 is dit echter anders. Deze dual-gain sensor heeft bij elke pixel twee analoge versterkers zitten. De ene is voor lage gevoeligheid, en de andere is voor hoge gevoeligheid. De eerste is zeg maar vergelijkbaar aan die van de ASI1600. Maar de tweede is zo ingericht dat het dynamisch bereik vergroot wordt, en de ruis verlaagd. Vanaf een bepaalde gain stand schakelt de sensor van het ene setje naar het andere. Voor de ASI294 is dat gain 120. Overigens hebben ze het zo ingeregeld dat gain 120 ook unity gain is. De meeste sensoren die dit hebben zijn op deze manier in staat om in die 'gevoelige stand' hetzelfde dynamisch bereik te hebben als bij gain 0, maar dus wel in een hogere gevoeligheid en een veel lagere ruis. Technisch gezien heeft het geen effect op de full well capacity, maar dit is iets minder relevant omdat de dynamic range vergroot wordt. Voor de ASI294 kleven er dus nagenoeg geen nadelen aan gain 120 (unity gain). Overigens ook geen voordelen aan een andere gain stand. Ga je hoger dan nemen dynamic range en full well depth verder af, maar de ruis blijft hetzelfde. Ga je lager wordt het alleen maar slechter, totdat je naar gain 0 gaat. Dan heb je zit je uiteindelijk ietsje hoger in dynamic range, maar nu bij lagere gevoeligheid. Dit kan handig zijn als je bewust langere belichtingstijden wilt, maar dit komt in de praktijk volgens mij niet vaak voor.
Samengevat is het voor de ASI294 dus: Gain 120 = hogere gevoeligheid, lagere full well capacity, zelfde dynamic range, lagere ruis.
Dus mijn veronderstelling zou zijn dat voor de ASI1600 unity gain als uitgangspunt een prima instelling is, maar dat je afhankelijk van je object en gebruikte filters ook naar bijvoorbeeld gain 0 of gain 300 kunt gaan. Voor de ASI294 is unity gain de beste oplossing voor eigenlijk alle omstandigheden.
Voor de duidelijkheid zijn in onderstaand grafiekje de effecten van gain op diverse parameters nog even samengevat:
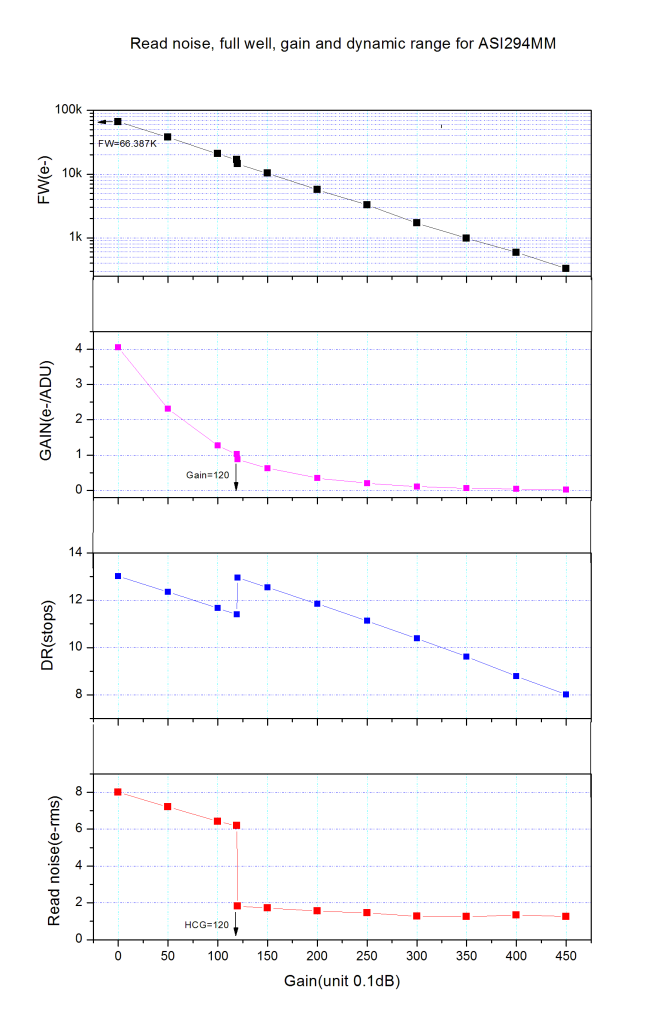
- 294MM_FW_EG_DR_RN-654x1024.png (106.44 KiB) 8350 keer bekeken